I have nearly completed my honours after many months of work. My initial idea was to keep this website updated with its progress but it was such a busy year I had very little time to do so.
The completed system uses the D star search algorithm and simulated planetary data from the University of Dundee’s space research groups PANGU system. The simulation runs in real time and it is possible to see the rovers map update in real time as well as being able to have a view of what the rover sees.
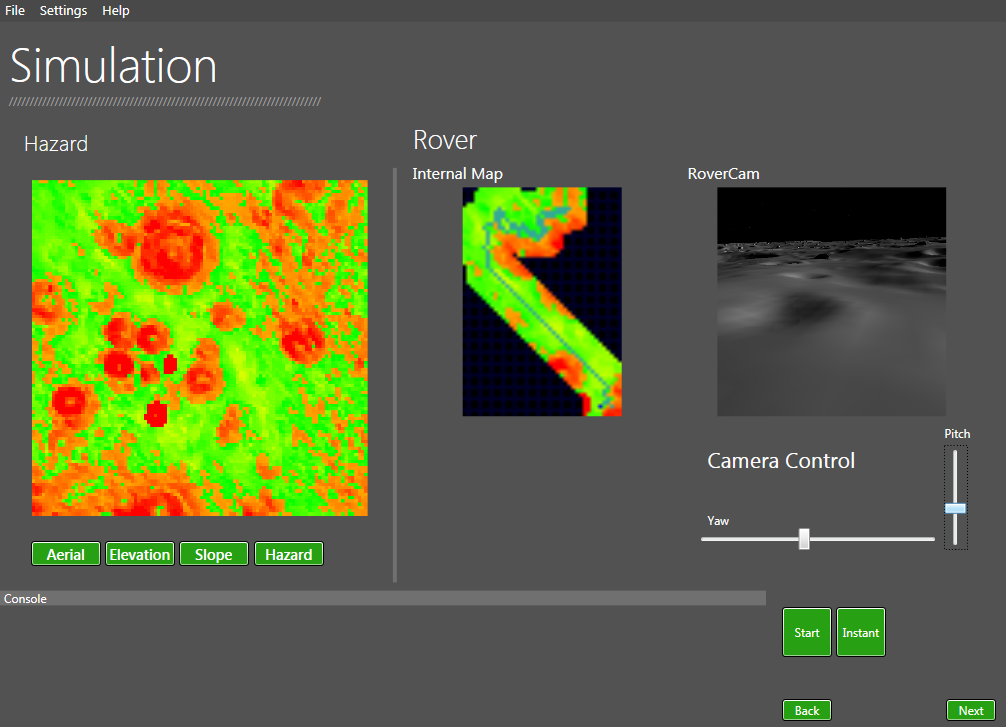
The image above shows the rover safely traverse a 10485m² region. As the rover moves along it uses its simulated sensors to retrieve data about it’s environment. Using the D star search algorithm is it able to successfully make alterations to it’s current path on the fly without having to perform a brand new search. This saves a lot of time and is especially good with very large regions.
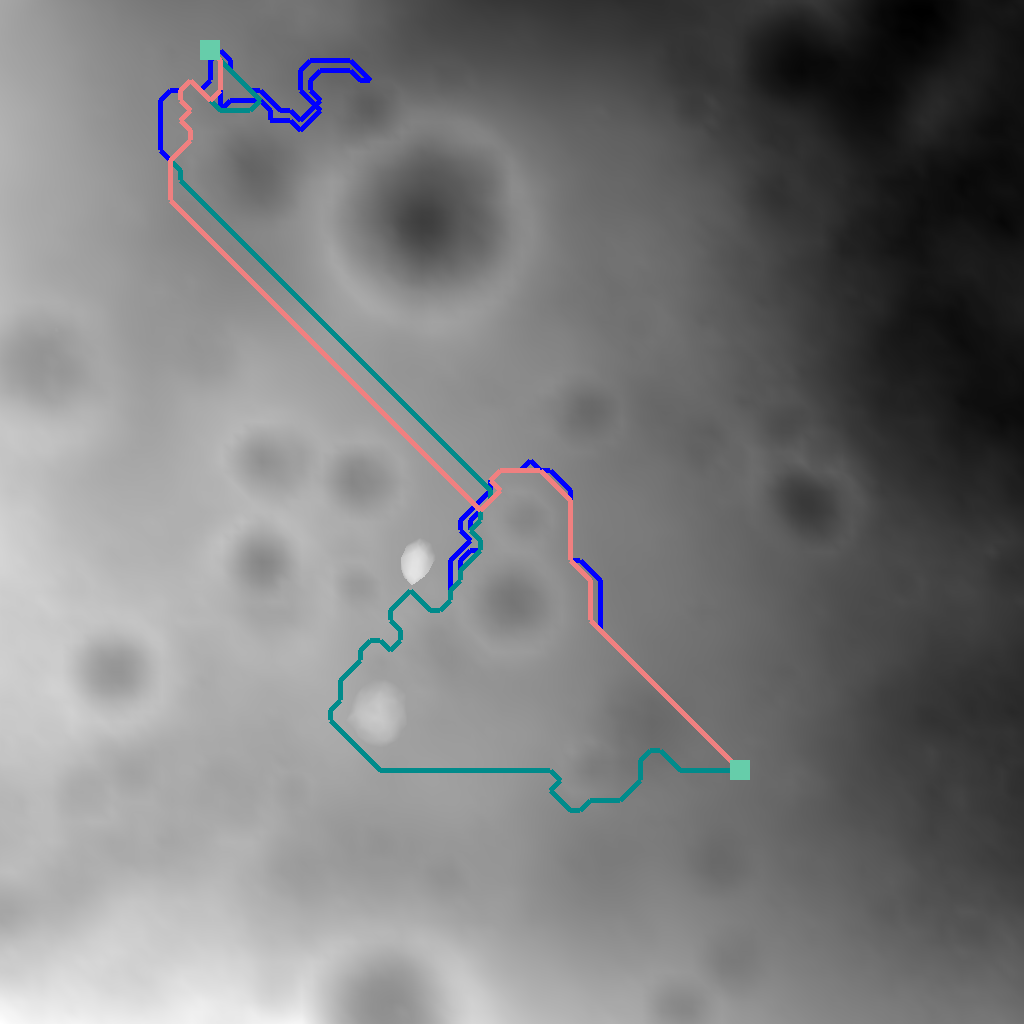
The system can run comparison simulations using different path finding algoirthms and compare results.
Once I have completed my project at the start of May I plan to write up a section on this website which goes into detail about the project, how it works etc.I also plan to make a video of the system in action. The interface has a stage progression system which is kind of difficult to show in images plus it would be nice to be able to see the system working in real time.